- tel:+86-13222111178
- email:info@ntjugao.com






¿Cuáles son los componentes principales de un robot de soldadura?
¿Cuáles son los componentes principales de un robot de soldadura?

Los robots de soldadura son equipos de soldadura comunes y ampliamente utilizados en el campo de la soldadura. En comparación con la soldadura tradicional, los robots de soldadura son mucho más rápidos. Un robot de soldadura se compone principalmente de dos partes: el cuerpo del robot y el equipo de soldadura automatizado. Los robots de soldadura son dispositivos modernos y automatizados que integran informática, electrónica, sensores, inteligencia artificial y otras tecnologías. Logran fácilmente resultados de soldadura estables y mejorados, permiten una producción continua las 24 horas y aumentan significativamente la eficiencia productiva, sustituyendo durante largos periodos el trabajo manual en entornos peligrosos. Entre los robots de soldadura utilizados directamente para soldar se incluyen los de soldadura por arco eléctrico, soldadura por resistencia y soldadura por gas.
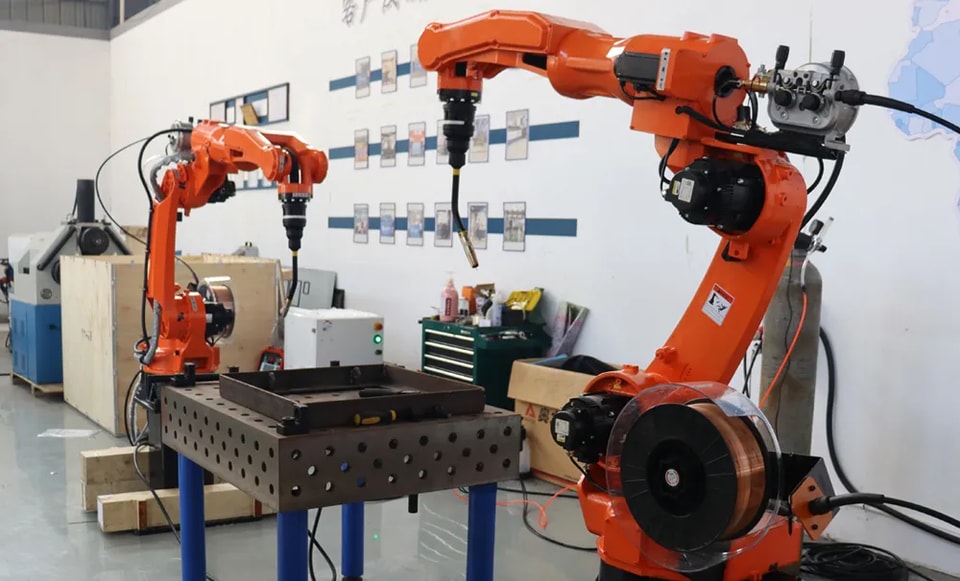
Robots de soldadura
I. Componentes de un robot de soldadura
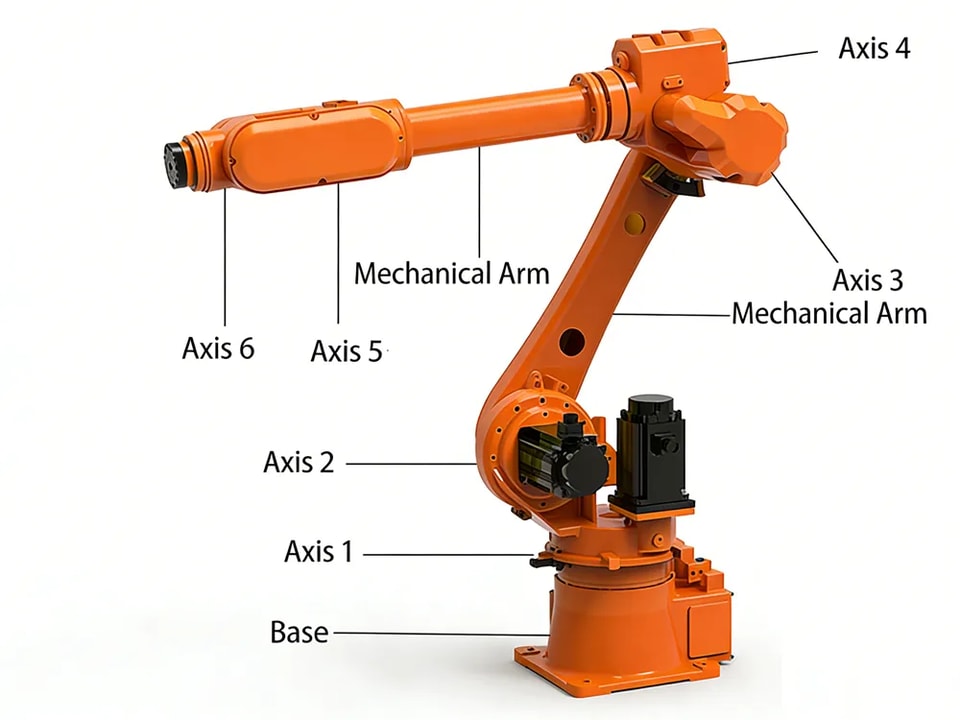
1. Parte actuadora: es la estructura mecánica que transmite fuerza o par y realiza acciones específicas para completar la tarea de soldadura. Incluye el cuerpo, el brazo, la muñeca y la mano del robot.

2. Parte de control: son los componentes electrónicos y eléctricos y el sistema informático encargados de controlar la estructura mecánica para completar la operación de soldadura dentro de un programa y una trayectoria determinados.

3. Sección de fuente de energía y transmisión: esta sección comprende los componentes y dispositivos que suministran y transmiten energía mecánica a los actuadores. La fuente de energía suele ser eléctrica o hidráulica.

4. Sección de soporte del proceso: incluye principalmente la fuente de alimentación de soldadura del robot, el alimentador de hilo y el dispositivo de suministro de gas.

II. Selección de los grados de libertad de los robots de soldadura
El brazo y la muñeca de un robot de soldadura son los componentes básicos de movimiento. Cualquier diseño de brazo robótico tiene tres grados de libertad para garantizar que el efector final pueda alcanzar cualquier punto dentro de su rango de trabajo. Los tres grados de libertad de la muñeca son movimientos de rotación alrededor de tres ejes de coordenadas mutuamente perpendiculares X, Y y Z en el espacio, conocidos comúnmente como movimientos de rolido, cabeceo y guiñada.
Contáctenos
