- tel:+86-13222111178
- email:info@ntjugao.com






¿Cuáles son los componentes de un sistema de robot de soldadura?
¿Cuáles son los componentes de un sistema de robot de soldadura?

Un sistema completo de robot de soldadura consta de varios componentes clave que trabajan en conjunto para garantizar la precisión y la eficiencia del proceso de soldadura.
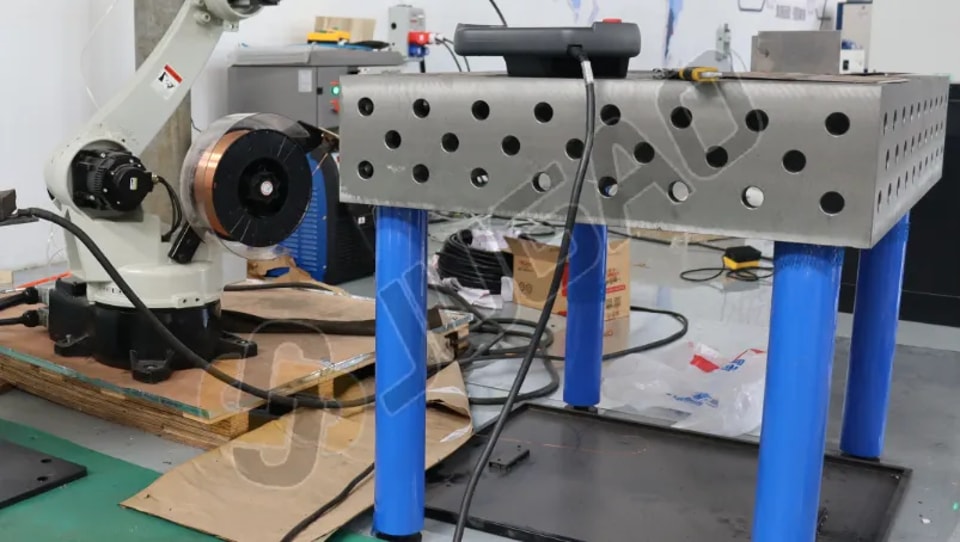
I. Cuerpo del robot
El cuerpo del robot es el componente central del sistema de robot de soldadura; por lo general, comprende un brazo mecánico, un sistema de accionamiento y un sistema de control. El brazo mecánico se encarga de ejecutar los movimientos de soldadura; normalmente presenta una estructura multieje con múltiples grados de libertad (por lo general seis), lo que le permite moverse y posicionarse con flexibilidad en el espacio tridimensional. El sistema de accionamiento—compuesto por servomotores y reductores—se encarga de proporcionar potencia y controlar con precisión los movimientos del brazo. El sistema de control recibe órdenes y coordina las acciones de los distintos componentes, garantizando así la precisión de la trayectoria de soldadura.

II. Fuente de energía de soldadura
La fuente de energía de soldadura es el suministro de energía que permite al robot de soldadura realizar sus funciones de soldadura. Según el proceso de soldadura específico empleado, las fuentes de energía más comunes incluyen fuentes de soldadura por arco, fuentes de soldadura láser, fuentes de soldadura por resistencia y otras. Entre ellas, la fuente de soldadura por arco es la más habitual, adecuada para una amplia gama de métodos de soldadura como MIG/MAG, TIG y soldadura manual por arco. El rendimiento de la fuente de energía de soldadura influye directamente en la calidad de la soldadura; por consiguiente, debe poseer características como salida estable, rápida velocidad de respuesta y alta precisión de ajuste.

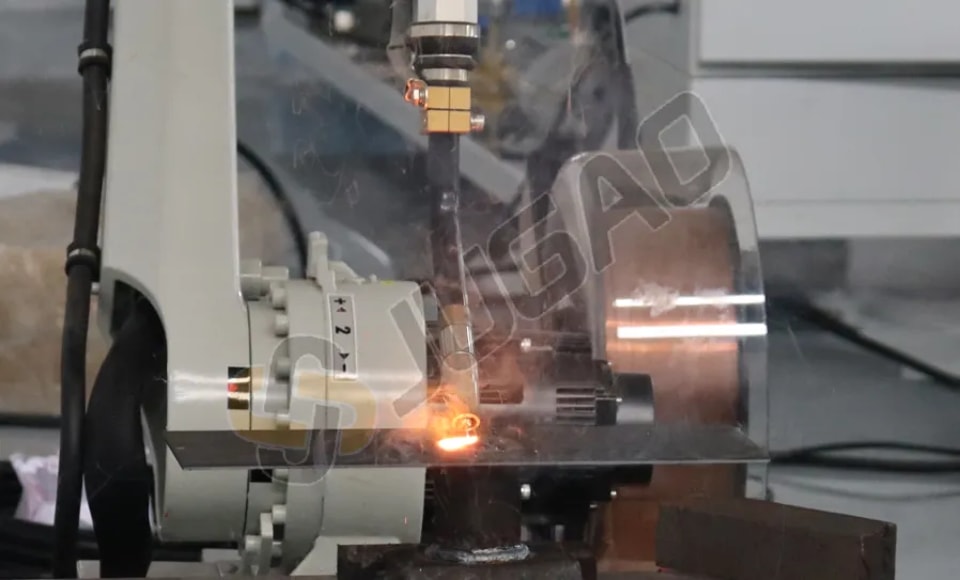
III. Antorcha de soldadura y mecanismo de alimentación de hilo
La antorcha de soldadura es la herramienta fundamental mediante la cual el robot de soldadura ejecuta las operaciones de soldadura; su función es introducir el hilo de soldadura en la zona de soldadura y, bajo la influencia de la fuente de energía, generar un arco eléctrico para realizar la soldadura. El mecanismo de alimentación de hilo se encarga de suministrar de forma continua y uniforme el hilo de soldadura desde la bobina hasta la antorcha. Este mecanismo suele estar compuesto por elementos como un motor de alimentación, rodillos de arrastre y un tubo guía; su estabilidad influye directamente en la calidad de la soldadura. Además, la antorcha de soldadura debe estar equipada con un sistema de refrigeración para evitar daños causados por las altas temperaturas.
IV. Sensores de soldadura y sistemas de visión
Para mejorar la precisión de la soldadura y el nivel de automatización, los robots de soldadura modernos suelen estar equipados con sensores de soldadura y sistemas de visión. Los sensores de soldadura se utilizan para supervisar parámetros—como la corriente, el voltaje y la temperatura—en tiempo real durante el proceso de soldadura, garantizando así la estabilidad del proceso. Los sistemas de visión, mediante cámaras y tecnologías de procesamiento de imágenes, identifican y localizan la costura de soldadura, ayudando al robot en el posicionamiento autónomo y la corrección de la trayectoria—una capacidad especialmente valiosa para soldar costuras complejas o irregulares.

V. Sistema de control y equipos de programación
El sistema de control actúa como el “cerebro” del sistema de robot de soldadura; normalmente consta de un controlador principal, un PLC (controlador lógico programable) y una interfaz de operador. El controlador principal se encarga de coordinar el funcionamiento general de los distintos componentes del robot; el PLC gestiona el control lógico y el procesamiento de señales; y la interfaz de operador proporciona capacidades de interacción hombre-máquina. El equipo de programación incluye colgantes de enseñanza y software de programación fuera de línea; los operarios pueden enseñar manualmente las trayectorias de soldadura mediante el colgante de enseñanza o utilizar el software de programación fuera de línea para realizar simulaciones y planificación de trayectorias en un ordenador.

VI. Sistemas de seguridad y equipos periféricos
Para garantizar la seguridad de los operarios y el funcionamiento correcto del equipo, el sistema de robot de soldadura también está equipado con un sistema de seguridad integral. Este sistema de seguridad comprende dispositivos como botones de parada de emergencia, barreras de seguridad, cortinas de luz y relés de seguridad, que pueden cortar rápidamente la alimentación en caso de anomalía para evitar accidentes. Además, los equipos periféricos—como mesas de trabajo de soldadura, utillajes, sistemas de extracción de polvo y dispositivos de protección con gas—constituyen una parte integral del sistema de robot de soldadura, proporcionando apoyo esencial y garantías para el proceso de soldadura.
VII. Bases de datos de procesos de soldadura y soporte de software
Los sistemas modernos de robots de soldadura suelen estar equipados con bases de datos de procesos de soldadura y soporte de software asociado. Estas bases de datos almacenan los parámetros óptimos de soldadura para distintos materiales, espesores y posiciones de soldadura; los operadores pueden acceder a los parámetros adecuados en función de las condiciones reales, mejorando así tanto la eficiencia como la calidad de la soldadura. El soporte de software abarca herramientas como software de simulación de robots, software de optimización de trayectorias y software de monitoreo remoto, todo lo cual facilita la gestión digital e inteligente del proceso de soldadura.
Contáctenos
